Comment comprendre le fonctionnement du robot ?
Il n'est pas possible de faire tourner les roues du robot avec les mains : Risques de détérioration.
Nous allons donc construire une maquette fonctionnelle pour analyser le comportement du robot.
Il n'est pas possible de faire tourner les roues du robot avec les mains : Risques de détérioration.
Nous allons donc construire une maquette fonctionnelle pour analyser le comportement du robot.
Vous devez imaginer une solution technique et faire un croquis pour pouvoir analyser le fonctionnement des roues d'un robot sans détériorer la base réelle.
Photos du réel robot :

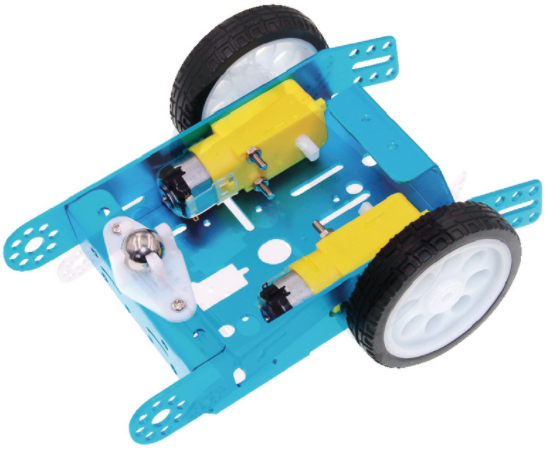
Pour réaliser le croquis de votre maquette, vous avez à votre disposition les différentes éléments de la photographie ci-dessous.

Vous devez faire valider votre croquis par votre professeur pour avoir le matériel nécessaire à la construction de votre maquette.
Vous devez demander la mallette des liaisons à votre professeur et en vous aidant des animations ( ICI ) vous devez identifier et écrire sur votre croquis 2 différentes liaisons mécanique.
Construisez votre maquette puis vous devez demander un pied à coulisse à votre professeur.
En vous aidant de la notice d'utilisation du pied à coulisse (ICI) et du référencement des vis (ICI) vous devez indiquer sur votre croquis la référence exacte des 3 vis.
Demandez à votre professeur la mallette d'adhérence des matériaux et avec l'aide de la vidéo ci-dessous vous devez identifier le matériaux utilisé pour les pneus du robot et justifier ce choix.
Vous devez rédiger un protocole de test sous LibreOffice et l'enregistrer dans votre répertoire partagé de l'ENT.
Avec l'aide de votre maquette vous devez renseigner le tableau ci-dessous en utilisant dans les colonnes Roue droite et Roue gauche que les cinq abréviations différentes ci-dessous :
Av : Avant
Ar : Arrière
Stp : Stop
Pv : Petite vitesse
Gv : Grande vitesse
A noter que plusieurs abréviations peuvent être possibles dans la même cellule
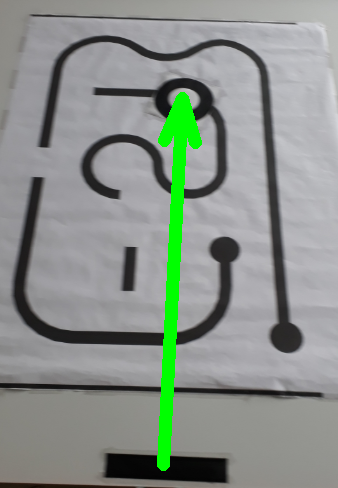
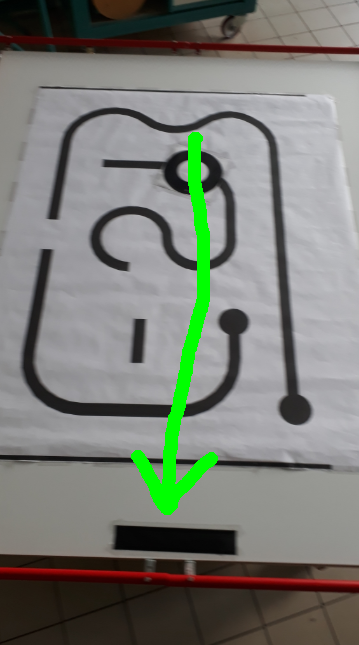
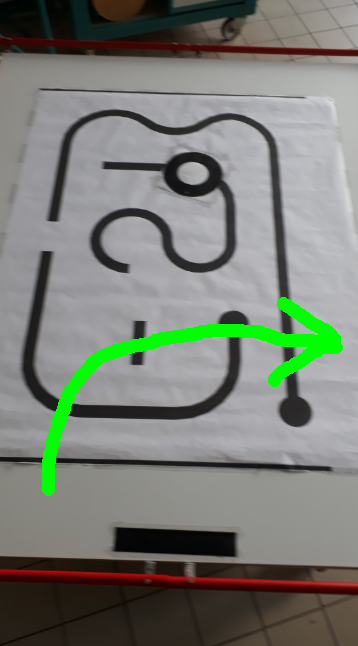
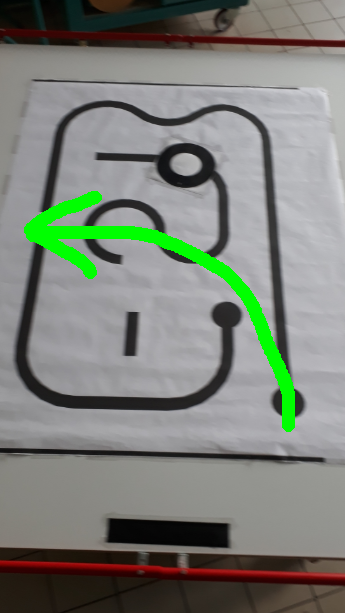
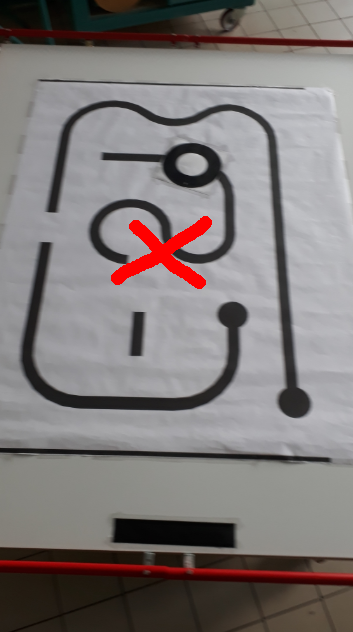
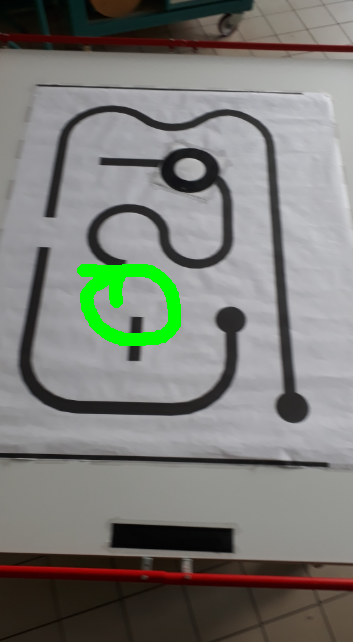
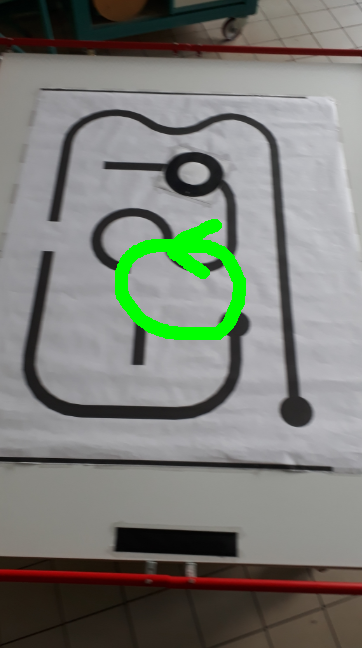
Pour vous aider à renseigner la trajectoire du robot, vous devez analyser les trajectoires réelles de l'activité N°5
| Trajectoire du robot | Roue droite | Roue gauche |
| Avant | ||
| Arrière | ||
| Tourne à droite | ||
| Tourne à gauche | ||
| Arrêt | ||
| Pivote à droite sur place | ||
| Pivote à gauche sur place | ||
| Tourne à droite sur place | ||
| Tourne à gauche sur place |
Vous devez maintenant vérifier vos hypothèses et programmer votre robot avec votre tableau.
Suivant la solution technique que vous avez retenue dans le chapitre précédent, vous avez dans le sous menu une aide pour la technologie Mbot et une aide pour la technologie Arduino.
Important pour vos premiers pas :
Vous avez à votre disposition un robot, un coupleur de batteries, un câble USB et un support.
Le support doit être systématiquement utilisé sous le robot sur vos postes de travail. Le support permet de ne pas avoir de contact entre les roues et le poste de travail lors de vos tests et ainsi analyser la rotation des roues sans déplacement du robot. Le positionnement du support est important : La partie double est à positionner de chaque côté de la bille devant votre robot
Le câble permet de transférer votre programme entre l'ordinateur et le robot. Lorsque vous concevez votre programme sur l'ordinateur, le programme n'est pas dans le robot et vous devez donc le "Téléverser"
La batterie permet de faire fonctionner vos moteurs car la carte même avec la liaison USB ne permet pas de faire fonctionner vos moteurs.
Etape N°1 : Je programme la marche avant de mon robot (Faire fonctionner les moteurs à 50% de puissance pendant 2.5 secondes)
Etape N°2 : Je programme la marche arrière de mon robot (Faire fonctionner les moteurs à 50% de puissance pendant 2.5 secondes)
Etape N°3 : Le robot tourne à droite (Faire fonctionner les moteurs à 50% de puissance pendant 2.5 secondes)
Etape N°4 : Le robot tourne à gauche (Faire fonctionner les moteurs à 50% de puissance pendant 2.5 secondes)
Etape N°5 : Le robot est à l'arrêt
Etape N°6 : Le robot pivote à droite sur place (Faire fonctionner les moteurs à 50% de puissance pendant 2.5 secondes)
Etape N°7 : Le robot pivote à gauche sur place (Faire fonctionner les moteurs à 50% de puissance pendant 2.5 secondes)
Etape N°8 : Tourne à droite sur place (Faire fonctionner les moteurs à 50% de puissance pendant 2.5 secondes)
Etape N°9 : Tourne à gauche sur place (Faire fonctionner les moteurs à 50% de puissance pendant 2.5 secondes)
N'oubliez pas d'enregistrer vos programmes Mblock dans votre répertoire partagé de l'ENT
Votre fichier doit être à jour sur votre répertoire partagé pour contrôle par votre professeur